一、AutoFIS [2020]
《AutoFIS: Automatic Feature Interaction Selection in Factorization Models for Click-Through Rate Prediction》
显式的特征交互可以显著提高
CTR模型的性能。早期的协同过滤推荐算法,如矩阵分解(matrix factorization: MF)和分解机(factorization machine: FM),用一个bi-linear learning model抽取二阶信息。然而,并非所有的交互都有利于性能。一些基于树的方法已经被提出来,以自动找到有用的特征交叉。
gradient boosting decision tree: GBDT试图找到损失函数梯度较高的交互。AutoCross在一个树状结构的空间中搜索有效的交互。但是树型模型在multi-field categorical data的推荐系统中只能探索所有可能的特征交互中的一小部分,所以它们的探索(exploration)能力受到限制。同时,深度神经网络
DNN模型被提出。它们的表达能力更强,而且根据通用近似特性(universal approximation property),它们可以探索大多数的特征交互。然而,使用基于梯度的优化,并不能保证DNN自然地收敛到任何预期的函数。简单的DNN模型可能无法找到合适的特征交互。因此,人们提出了各种复杂的架构,如深度兴趣网络(Deep Interest Network: DIN)、深度分解机(Deep Factorization Machine: DeepFM)、Product-based Neural Network: PNN、以及Wide & Deep。因子分解模型(Factorization Model)(如FM, DeepFM, PNN, Attention Factorization Machine: AFM, Neural Factorization Machine: NFM),已被提出采用feature extractor来探索显式的特征交互。然而,所有这些模型要么是简单地枚举所有的特征交互,要么是需要人为的努力来识别重要的特征交互。前者总是给模型带来巨大的内存和计算成本,并且难以扩展到高阶交互。此外,无用的特征交互可能带来不必要的噪音,使训练过程复杂化。后者,如在
Wide & Deep中手动识别重要的特征交互,具有很高的人力成本,并有可能错过一些反直觉的(但重要的)特征交互。如果在这些因子分解模型中可以事先识别出有用的特征交互,那么模型就可以专注于对它们的学习而不必处理无用的特征交互。通过去除无用甚至有害的特征交互,我们期望模型能在降低计算成本的情况下表现得更好。
为了自动学习哪些特征交互是必要的,我们为每个特征交互引入了一个
gate(处于打开或关闭状态),以控制其输出是否应该被传递到下一层。在以前的工作中,gate的状态要么是由专家知识事先指定、要么是设置为全部打开。从数据驱动的角度来看,一个gate是打开还是关闭,应该取决于每个特征交互对最终预测的贡献。显然,那些贡献小的特征交互应该关闭,从而防止给模型学习引入额外的噪音。然而,要找到模型性能的最佳open gate集合是一个NP-Hard问题,因为我们面临着一个巨大的空间(如果我们只考虑2阶特征交互, 则搜索空间为feature field的数量)来搜索。受最近用于神经架构搜索的
DARTS的启发,论文《AutoFIS: Automatic Feature Interaction Selection in Factorization Models for Click-Through Rate Prediction》提出了一个两阶段的方法AutoFIS,用于自动选择因子分解模型中的低阶特征交互和高阶特征交互:在搜索阶段,
AutoFIS不是在一组离散的候选特征交互上进行搜索,而是通过引入一组架构参数(architecture parameters)(每个特征交互一个)从而将choice松弛为连续的,这样就可以通过梯度下降学习每个特征交互的相对重要性。架构参数与神经网络权重由GRDA优化器(一种容易产生稀疏解的优化器)联合优化,这样训练过程可以自动丢弃不重要的特征交互(架构参数为零)而保留那些重要的特征交互。之后,在
re-train阶段,AutoFIS选择架构参数值非零的特征交互,用选定的特征交互重新训练模型,同时将架构参数作为注意力单元(attention unit),而不是交互重要性的指标。
论文在三个大规模的数据集上进行了广泛的实验(两个公开的
benchmark、一个是private数据集)。实验结果表明:AutoFIS可以显著提高所有数据集上因子分解模型的CTR预估性能。由于AutoFIS可以去除大约50%-80%的二阶特征交互,原始模型总是可以实现效率的提升。通过学习每个三阶特征交互的重要性,论文还将AutoFIS应用于三阶交互的选择。实验结果表明:在选择了大约1%-10%的三阶交互之后,因子分解模型的AUC可以提高0.1%-0.2%,而不会引入很多计算成本。实验结果表明,使用
AutoFIS进行高阶特征交互的自动选择是一个很有前景的方向。实验还表明,重要的二阶特征交互和三阶特征交互,通过在FM中由AutoFIS所识别,也可以大大提升目前SOTA模型的性能,这意味着我们可以使用一个简单的模型进行交互选择(interaction selection),并将选择结果应用于其他模型。此外,论文在真实数据和人工合成数据上分析了AutoFIS所选择的特征交互的有效性。此外,在华为应用商店的推荐服务中进行了为期十天的online A/B test,其中AutoFIS产生的推荐模型比DeepFM实现了20.3%的CTR改善、以及20.1%的CVR改善,这为业务收入的增长做出了巨大贡献。综上所述,本文的主要贡献如下:
论文通过经验验证:在训练因子分解模型时,去除冗余的特征交互是有益的。
论文提出了一个两阶段的算法
AutoFIS来自动选择因子分解模型中重要的低阶特征交互和高阶特征交互。在搜索阶段,
AutoFIS可以在一个完整的训练过程中通过架构参数学习每个特征交互的相对重要性。在重训练阶段,移除不重要的交互,作者重新训练得到的神经网络,同时保留架构参数作为注意力单元从而帮助模型的学习。
在三个大规模数据集上的离线实验证明了
AutoFIS在因子分解模型中的优越性能。此外,AutoFIS还可以找到一组重要的高阶特征交互,以提升现有模型的性能,而没有引入太多的计算成本。一个为期十天的online A/B test表明,AutoFIS在CTR和CVR方面将DeepFM模型平均提高了约20%。
相关工作:
factorization machine: FM将每个特征投影到一个低维向量中,并通过内积来建模特征交互,这对于稀疏的数据来说效果很好。Field-aware factorization machine: FFM进一步使每个特征有多个vector representation从而与其他field的特征进行交互。最近,深度学习模型在一些公共
benchmark上取得了SOTA的性能。有几个模型使用MLP来改进FM,如Attention FM、Neural FM。Wide & Deep联合训练了一个wide模型(采用人工特征)、和一个deep模型(采用原始特征)。DeepFM使用一个FM layer来代替Wide & Deep中的wide组件。PNN使用MLP来建模FM layer和feature embeddings的交互,而PIN引入了network-in-network架构来建模pairwise特征交互,而不是PNN和DeepFM的内积操作。PNN用内积/外积来建模feature embeddings的交互。
需要注意的是:现有的因子分解模型都是简单地枚举所有二阶的特征交互,其中包含了许多无用的和噪音的交互。
gradient boosting decision tree: GBDT是一种通过决策树算法进行特征工程和搜索交互的方法。然后,转换后的特征交互可以被送入逻辑回归或FFM模型。在实践中,树状模型更适合于连续数据,但不适合推荐系统中的高维categorical data,因为categorical feature的使用率很低。同时,也有一些工作使用
AutoML技术来处理推荐系统中的问题。人们提出了AutoCross在许多候选特征的子集上进行搜索,从而识别有效的交互。这需要训练整个模型来评估每一个所选择的特征交互,但候选集多得令人难以置信:例如,对于一个有field的数据集,仅仅考虑二阶特征交互就有AutoCross通过两个方面的近似来加速:它通过树状结构中的
beam search贪心地构建局部最优的特征集合。它通过
field-aware LR模型来评估新生成的特征集合。
由于这两种近似,从
AutoCross中提取的高阶特征交互可能对深度模型没有用。与
AutoCross相比,我们提出的AutoFIS只需要执行一次搜索阶段来评估所有特征交互的重要性,这要高效得多。此外,AutoFIS学到的有用的交互将改善深度模型,因为这些特征交互是在该深度模型中直接学习和评估的。最近,
one-shot架构搜索方法(如DARTS)已经成为最流行的神经架构搜索(neural architecture search: NAS)算法,以有效地搜索网络架构。在推荐系统中,这种方法被用来为协同过滤模型搜索适当的交互函数。《Efficient Neural Interaction Function Search for Collaborative Filtering》中的模型主要是为特征交互识别适当的交互函数,而我们的模型主要是搜索和保留重要的特征交互。受最近用于神经架构搜索的
DARTS工作的启发,我们将搜索有效特征交互的问题表述为一个包含架构参数(architecture parameters)的连续搜索问题。与DARTS使用two-level optimization来交替优化架构参数和模型权重,并通过训练集和验证集进行迭代不同,我们使用one-level optimization来联合训练这两类参数,并以所有数据作为训练集。
1.1 模型
1.1.1 Factorization Model: Base Model
因子分解模型是指:通过内积或神经网络等操作将来自不同特征的几个
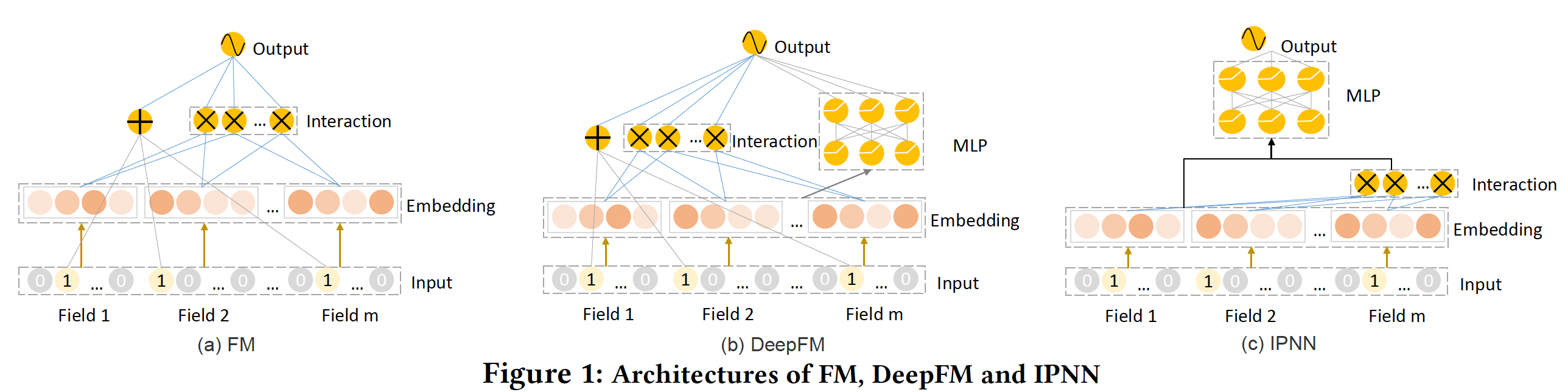
embedding的交互建模为一个实数。我们将FM、DeepFM和IPNN作为实例来描述我们的算法,并探索在各种数据集上的性能。下图展示了FM、DeepFM和IPNN模型的结构。FM由一个feature embedding layer和一个feature interaction layer组成。DeepFM和IPNN模型除了feature embedding layer、feature interaction layer之外,还有一个额外的MLP layer。DeepFM和IPNN的区别在于:在DeepFM中,feature interaction layer和MLP layer是并行工作的,而在IPNN中是堆叠排列的。
Feature Embedding Layer:在大多数CTR预测任务中,数据是以multi-field categorical form收集的。一个典型的数据预处理是:通过one-hot encoding或multi-hot encoding将每个数据实例转化为高维稀疏向量。只有当一个field是multivariate的时候,它才被表示为multi-hot encoding vector。一个数据样本可以被表示为:其中:
field数量,field的one-hot/multi-hot encoding vector。feature embedding layer用于将encoding vector转化为低维向量,即:其中:
field的embedding矩阵;field的feature value数量;如果
one-hot encoding vector,其中第1,那么如果
multi-hot encoding vector,其中第1,那么:sum池化)或者
feature embedding layer的输出为多个embedding向量的拼接:Feature Interaction Layer:将特征转换到低维空间后,可以用feature interaction layer在这样的空间中建模特征交互。首先,计算
pairwise特征交互的内积:其中:
field的feature embedding;这里
pairwise特征交互的数量为可以根据
然后,在
FM和DeepFM模型中,feature interaction layer的输出为:在这里,所有的特征交互以相同的贡献被传递到下一层。正如前面内容所指出的(并将在实验部分得到验证),并非所有的特征交互都具有同等的预测性,无用的特征交互甚至会降低性能。因此,我们提出了
AutoFIS算法来有效选择重要的特征交互。为了研究我们的方法是否可以用来识别重要的高阶特征交互,我们将具有三阶交互(即三个
field的组合)的feature interaction layer定义为:其中
MLP Layer:MLP Layer由若干个带激活函数的全连接层组成,它学习特征的relationship和combination。单层MLP Layer的输出为:其中:
bias;relu为relu激活函数。Output Layer:FM模型没有MLP Layer,它直接将feature interaction layer和prediction layer相连:其中:
predicted CTR。DeepFM以并行的方式将feature interaction layer和MLP layer进行组合:IPNN以堆叠的方式将feature interaction layer和MLP layer进行组合:请注意,
IPNN的MLP layer也可以作为不同特征交互的re-weighting,从而捕获其相对重要性。这也是IPNN比FM和DeepFM有更高容量的原因。然而,在IPNN的公式中,人们无法检索到对应于每个特征交互的相对贡献的精确值。因此,IPNN中无用的特征交互既不能被识别、也不能被丢弃,这给模型带来了额外的噪声和计算成本。
Objective Function:FM、DeepFM和IPNN有着相同的目标函数,即最小化预测值和标签的交叉熵:其中:
label;
1.1.2 AutoFIS
AutoFIS自动选择有用的特征交互,可以应用于任何因子分解模型的feature interaction layer。AutoFIS可以分为两个阶段:搜索阶段(
search stage):检测有用的特征交互重训练阶段(
re-train stage):对具有选定特征交互的模型进行重训练。
核心思想:根据
data-driven的权重field交互特征的重要性,并裁剪不重要的field交互特征。AutoFIS和AFM很类似,它们都是学习每个交互特征的重要性,然而:AutoFIS通过自由参数来描述交互特征的重要性,可以视为global-level的建模。AFM通过attention机制来描述交互特征的重要性,可以视为sample-level的建模。理论上而言,对于给定的field-pair,我们可以统计所有样本在它上面的注意力权重,从而得到global-level的重要性。此外,
AFM用逐元素乘积来描述交互特征,而AutoFIS用内积。
a. 搜索阶段
为了便于介绍算法,我们引入了
gate操作来控制是否选择一个特征交互:一个打开的gate对应于选择一个特征交互,而一个关闭的gate则导致丢弃一个特征交互。所有二阶特征交互对应的gate的总数为open gate的集合是非常具有挑战性的,因为我们面临着一个难以置信的巨大空间在这项工作中,我们从不同的角度来处理这个问题:我们不是在一个离散的
open gate的集合上进行搜索,而是通过引入架构参数choice放宽为连续的,这样就可以通过梯度下降学习每个特征交互的相对重要性。下图显示了所提出的AutoFIS的概览。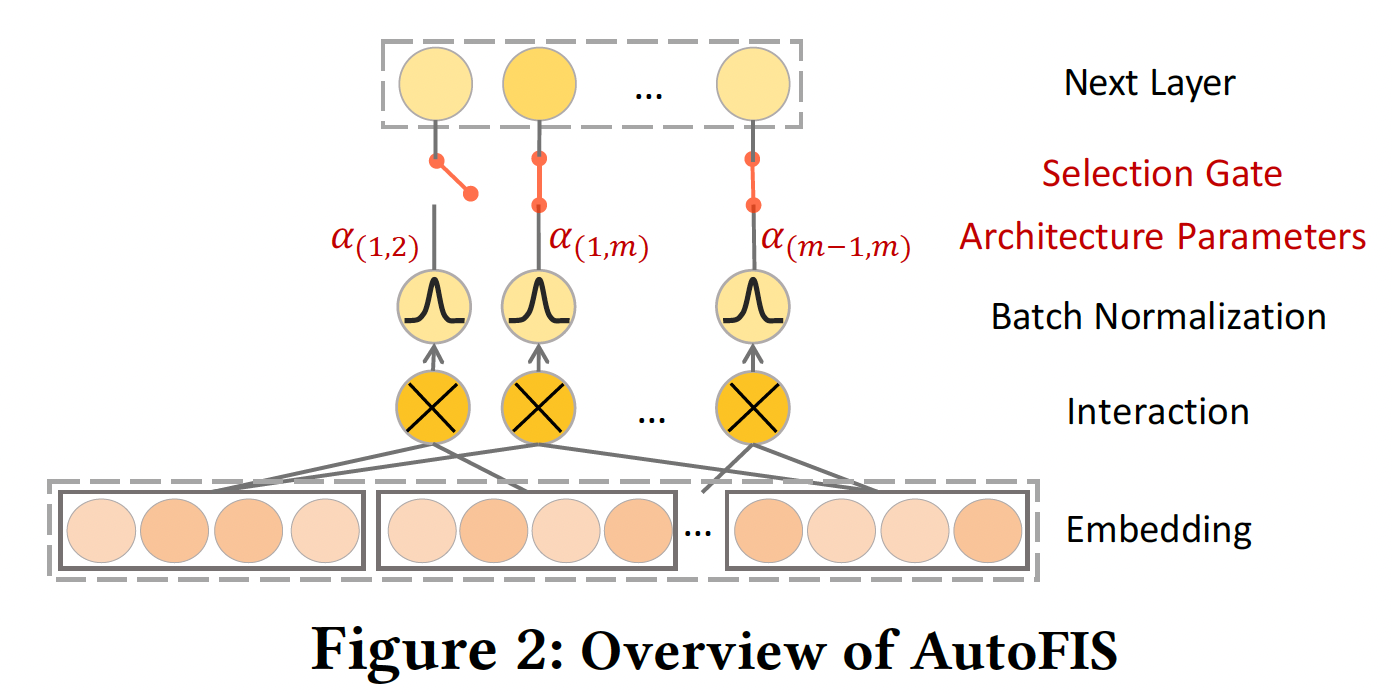
这种通过梯度学习的架构选择方案受到
DARTS的启发,其中,DARTS的目标是从卷积神经网络架构的一组候选操作中选择一个操作。具体而言,我们将因子分解模型中的interaction layer重新表述为:其中:
在
AutoFIS的搜索阶段,我们可以学习gate状态。如何确保
GRDA Optimizer来实现。此外,是否可以保留最重要的
field,而不仅仅是最重要的field pair?实际上,如果fieldfieldBatch Normalization:从整个神经网络的角度来看,特征交互的贡献由由于
scale耦合会导致对Batch Normalization: BN来消除其scale问题。原始的
BN采用mini-batch统计量从而对activated output进行标准化。具体而言:其中:
BN层的输入;BN层的输出;mini-batchBN层的可训练的scale/shift parameters;为了获得对
scale/shift parameters分别设为1和0。对每个特征交互BN操作计算如下:其中:
mini-batchGRDA Optimizer:generalized regularized dual averaging: GRDA优化器旨在获得一个稀疏的深度神经网络。为了在每个梯度step其中:
在搜索阶段,我们使用
GRDA优化器来学习架构参数除了
Adam优化器学习。One-level Optimization:为了在AutoFIS的搜索阶段学习结构参数DARTS不同。DARTS将higher-level决策变量、将网络权重lower-level变量,然后用bi-level优化算法对其进行优化。在DARTS中,假设只有当网络权重被正确学习后,模型才能选择操作,从而使在
AutoFIS的公式中,这意味着我们可以在网络权重被正确训练后决定gate应该打开还是关闭,这使我们回到了问题:完全训练DARTS建议只用一个梯度下降步来近似计算网络权重的最优值,并迭代地训练我们认为,这种近似的不精确性可能会降低性能。因此,我们建议不使用
bi-level优化,而是用one-level优化来联合优化在这种情况下,
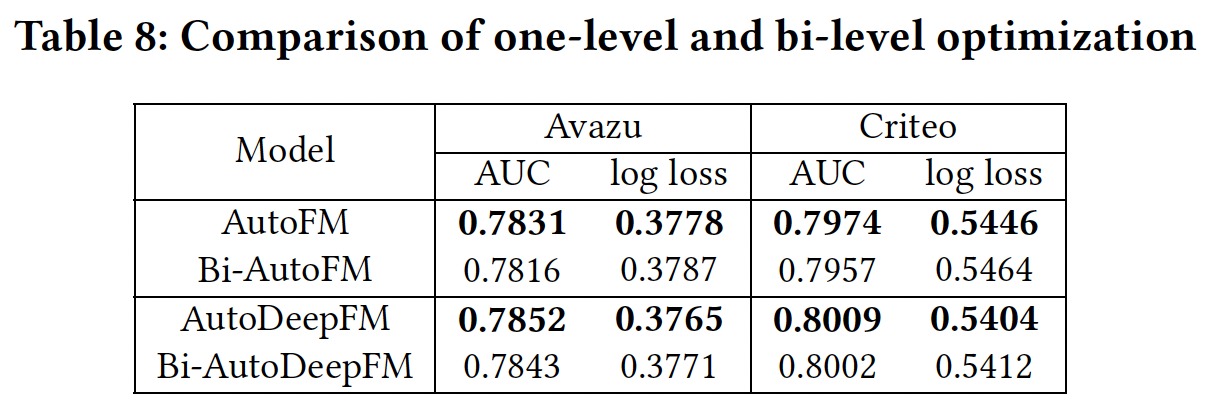
在实验部分中,我们将展示
one-level optimization比two-level optimization的优越性。
b. 重训练阶段
在搜索阶段的训练结束后,根据搜索阶段的架构参数
gate状态,当gate状态被固定为永久关闭。在移除这些不重要的交互后,我们重新训练新的模型。具体来说,
feature interaction layer被替换为:注意这里
Adam优化器学习。这里
0或1(根据特征交互的选择的结果),并且在训练过程中保持不变。重训练阶段,所有参数(包括
Adam优化器来优化。
1.2 实验
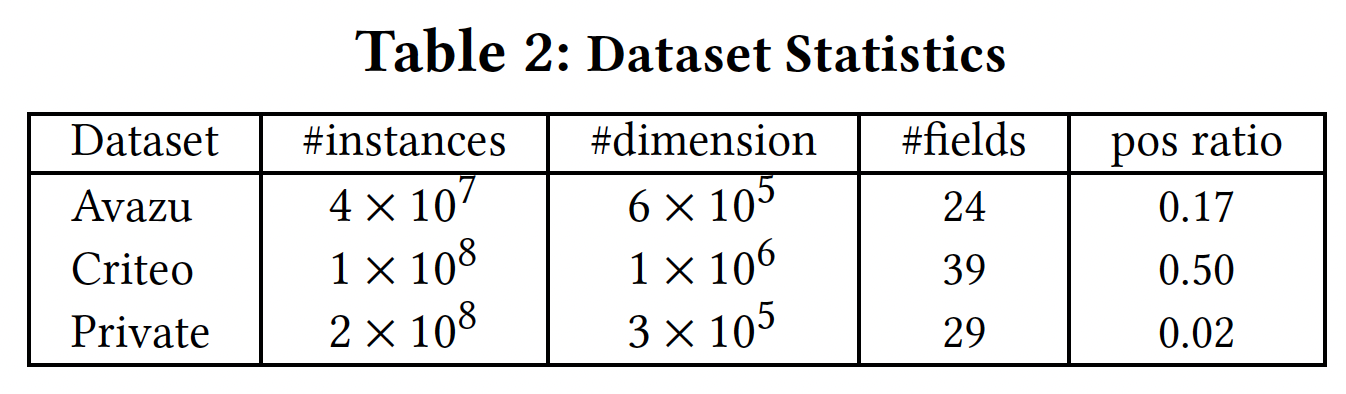
数据集:两个
public数据集(Avazu, Criteo)、一个private数据集。Avazu:在Kaggle的CTR预估竞赛中被发布。随机拆分80%的数据作为训练和验证,剩余20%用于测试。出现次数少于20次的categories将被删除从而进行降维。Criteo:包含一个月的点击日志,有数十亿的数据样本。我们选择"data 6-12"作为训练集和验证集,同时选择"day-13"进行评估。为了应对标签的不平衡,我们采用了负降采样的方法,使正样本比例大致保持在50%左右。13个数值字段通过分桶被转换为one-hot特征,其中某个字段中出现少于20次的特征被设置为dummy feature "other"。如何分桶?论文并未说明。
Private:从华为应用商店的游戏推荐场景中收集的。该数据集包含app特征(如ID, category),用户特征(如用户的行为历史)和上下文特征。
数据集统计结果如下表所示。
baseline:我们将AutoFIS应用于FM和DeepFM模型以显示其有效性(分别表示为AutoFM和AutoDeepFM)。baseline方法为:GBDT-based的方法(GBDT+LR, GBDT+FFM),FM模型(AFM, FwFM, FFM, IPNN)。由于其巨大的计算成本和源代码的不可用,我们没有将我们的模型与
AutoCross进行比较。评估指标:
AUC, Log loss。超参数配置:
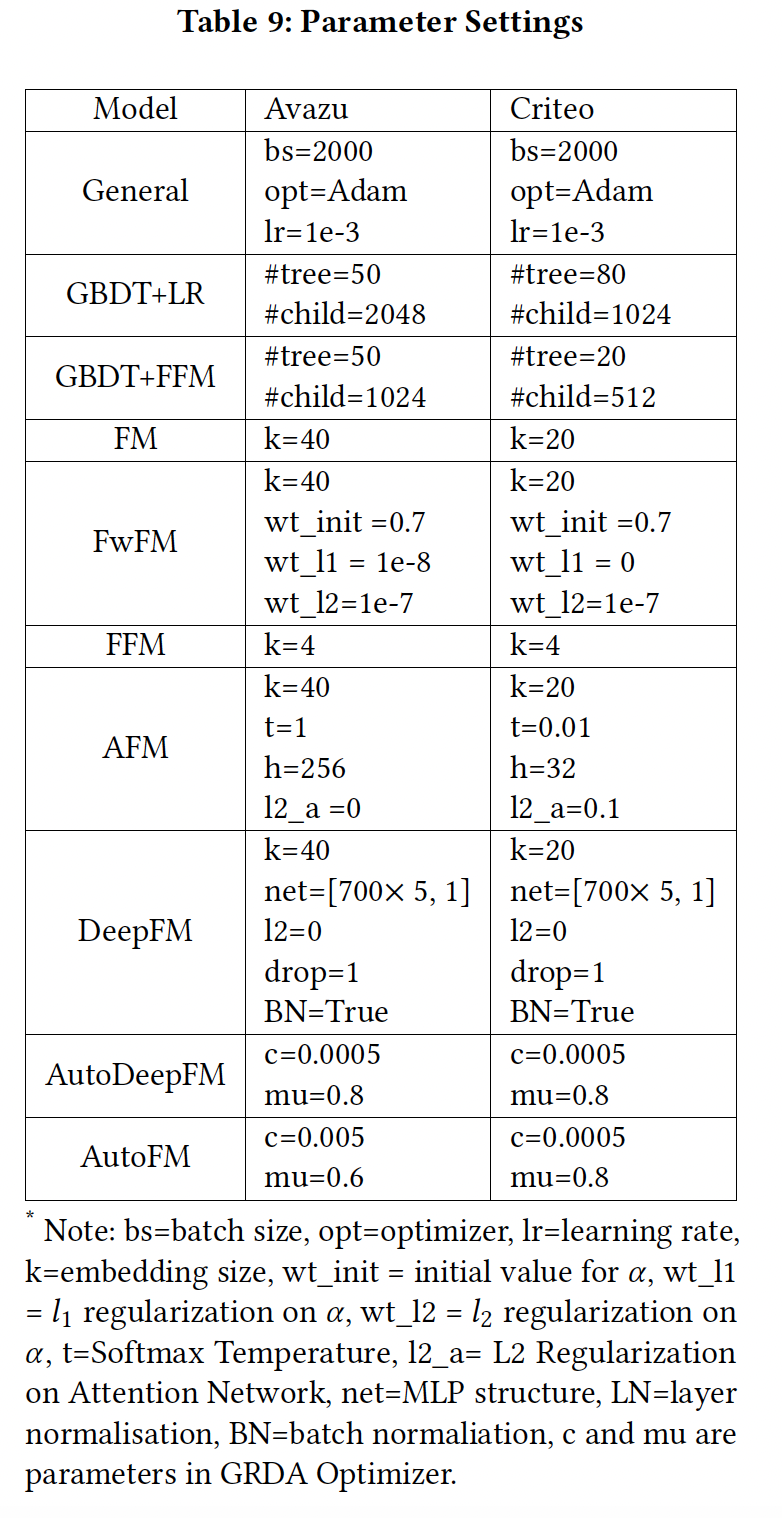
实现细节:
为
AutoFM和AutoDeepFM选择二阶特征交互:在搜索阶段,我们首先在所有训练数据上联合训练为
AutoFM和AutoDeepFM选择三阶特征交互:我们复用所选中的二阶交互,并在搜索阶段枚举三阶特征交互从而学习其重要性。最后,我们用选中的二阶交互和三阶交互来重新训练我们的模型。
注意,在搜索阶段,架构参数
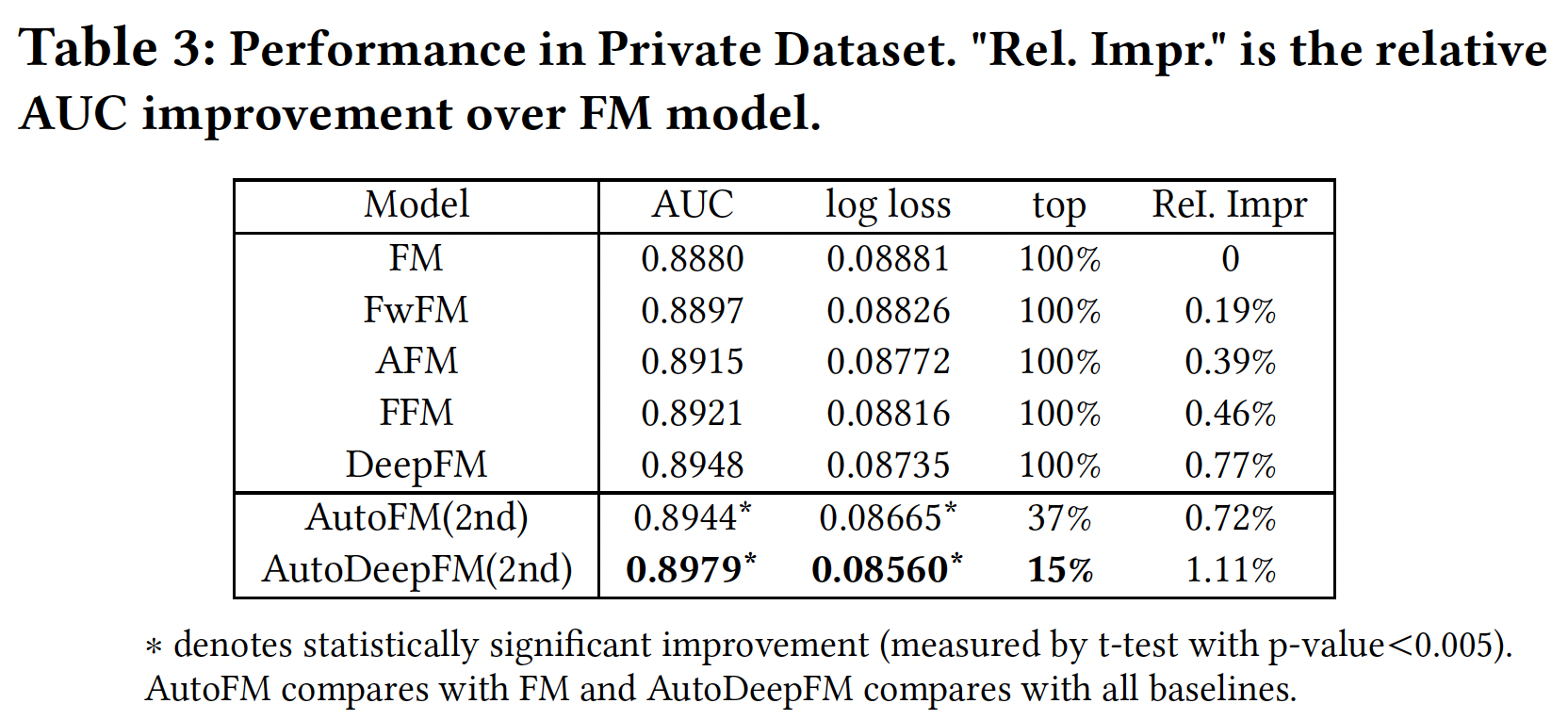
GRDA优化器优化,而其他参数Adam优化器优化。在重新训练阶段,所有参数都由Adam优化器优化。AutoFIS选择的特征交互:Table 1和Table3总结了AutoFM和AutoDeepFM在Avazu, Criteo, Private数据集上自动选择二阶重要交互和三阶重要交互的性能。可以看到:对于
Avazu数据集,FM/DeepFM分别可以移除71%/76%的二阶交互。移除这些无用的交互:不仅可以使模型在推理时更快:
AutoFM(2nd)和AutoDeepFM(2nd)的推理时间明显少于FM和DeepFM。而且可以明显提高预测准确性:从
AUC来看,AutoFM(2nd)比FM的相对性能提高了0.49%、AutoDeepFM(2nd)比DeepFM的相对性能提高了0.20%。
类似的改进也可以从其他数据集中得出。
对于高阶特征交互的选择,只有
2%-10%的三阶特征交互需要包含在模型中。AutoFM(3rd)和AutoDeepFM(3rd)的推理时间远远少于FM(3rd)和DeepFM(3rd)(与FM和DeepFM相当)。同时,通过移除不重要的三阶特征交互,准确率得到了显著的提高。即在
Avazu上的AUC指标上,AutoFM(3rd)比FM(3rd)的相对性能提高了0.22%、AutoDeepFM(3rd)比DeepFM(3rd)提高了0.20%。对
Criteo的观察也是如此。
所有这些性能提升都是以边际时间成本(
marginal time cost)实现的。例如,AutoDeepFM(3rd)在Avazu和Criteo用一块GPU卡搜索重要的二阶特征交互和三阶特征交互需要24分钟和128分钟。同样的结果可能需要人类工程师花很多小时或几天的时间来手动识别这些重要的特征交互。
注意,在
FM和DeepFM中直接枚举三阶特征交互会使推理时间增加7到12倍,这在工业应用中是不可接受的。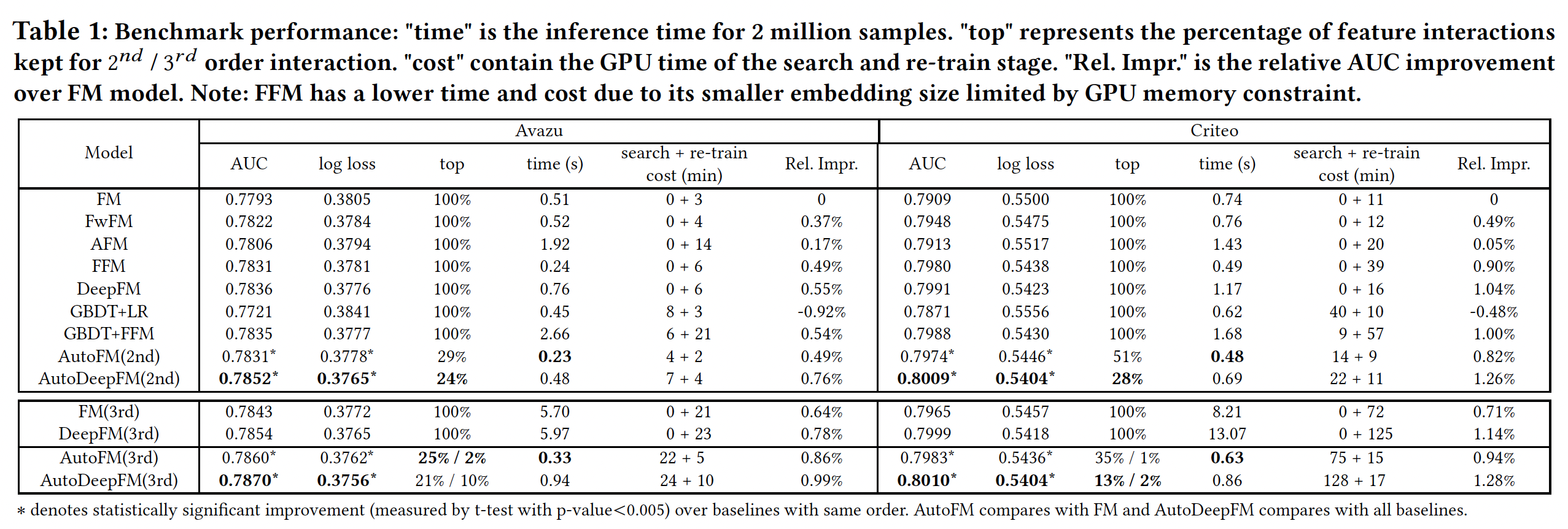
所选特征的可迁移性:我们研究了由
AutoFM(这是一个简单的模型)所学到的特征交互是否可以迁移到SOTA的模型(如IPNN)从而提高其性能。如下表所示:
使用
AutoFM选择的二阶特征交互(即AutoIPNN(2nd))实现了与IPNN相当的性能,在Avazu和Criteo的所有交互中约占30%和50%。使用
AutoFM选择的二阶特征交互和三阶特征交互(即AutoIPNN(3rd)),性能得到明显改善。
这两个证据都验证了
AutoFM所选择的特征交互的可迁移性。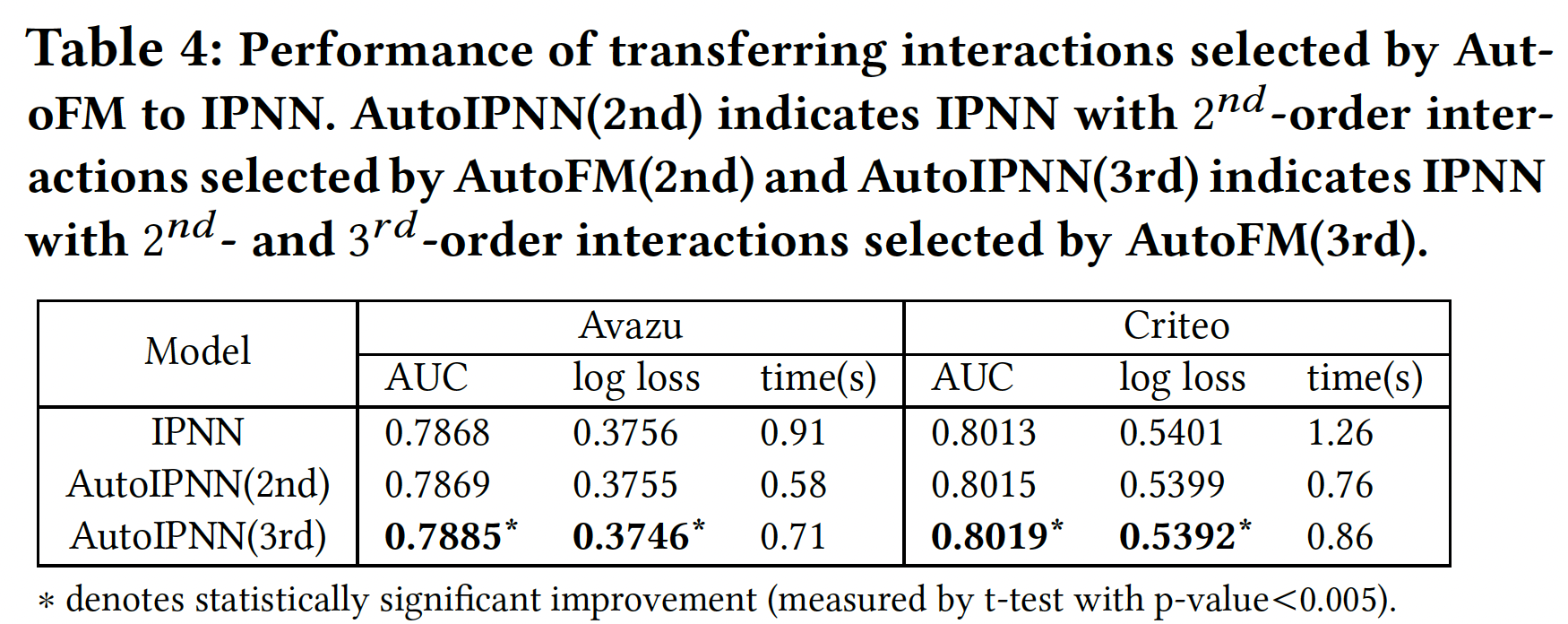
所选特征的效果:
在真实数据上:我们定义
statistics_AUC来表示一个特征交互对最终预测的重要性。对于一个给定的特征交互。我们构建一个只考虑该交互的predictor,其中prediction为训练集中特定特征交互的statistical CTR(#downloads/#impressions)。然后,这个predictor的AUC是相对于这个给定的特征交互的statistics_AUC。statistics_AUC越高,表明该特征交互在预测中的作用越重要。然后,我们将statistics_AUC和即,仅仅以这一对特征作为输入,
label不变。这个predictor如何构建?论文并未说明。可以选择LR或FM模型。如下图所示,我们可以发现,被我们模型选中的大多数特征交互(绝对值较高的
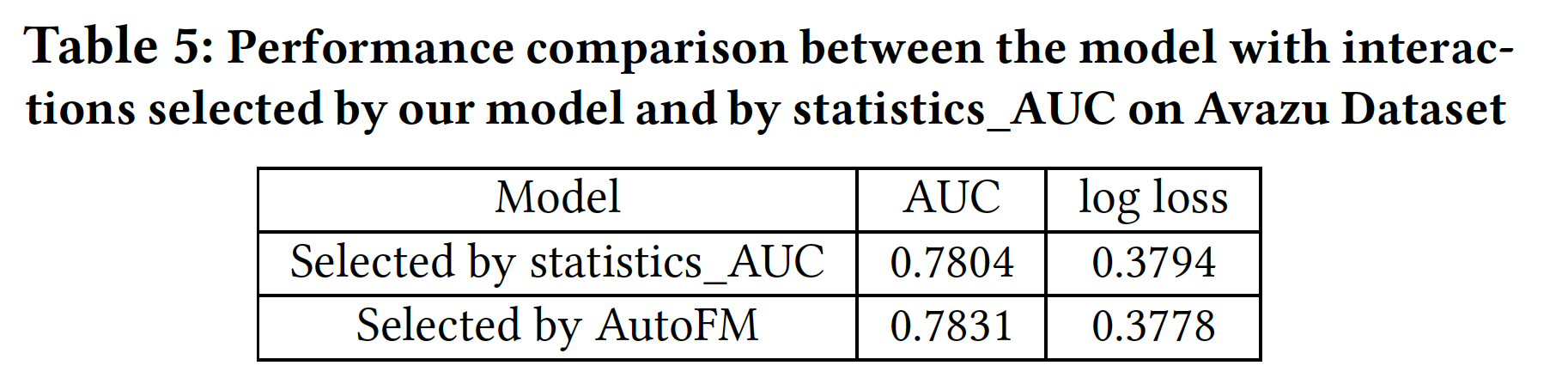
statistics_AUC,但并非所有具有高statistics_AUC的特征交互都被选中。这是因为这些交互中的信息也可能存在于其它交互中,而这些其它交互也被我们模型所选中。为了评估我们的模型所选择的特征交互的有效性,我们还根据
statistics_AUC选择了top-N特征交互(statistics_AUC选择的特征交互的模型。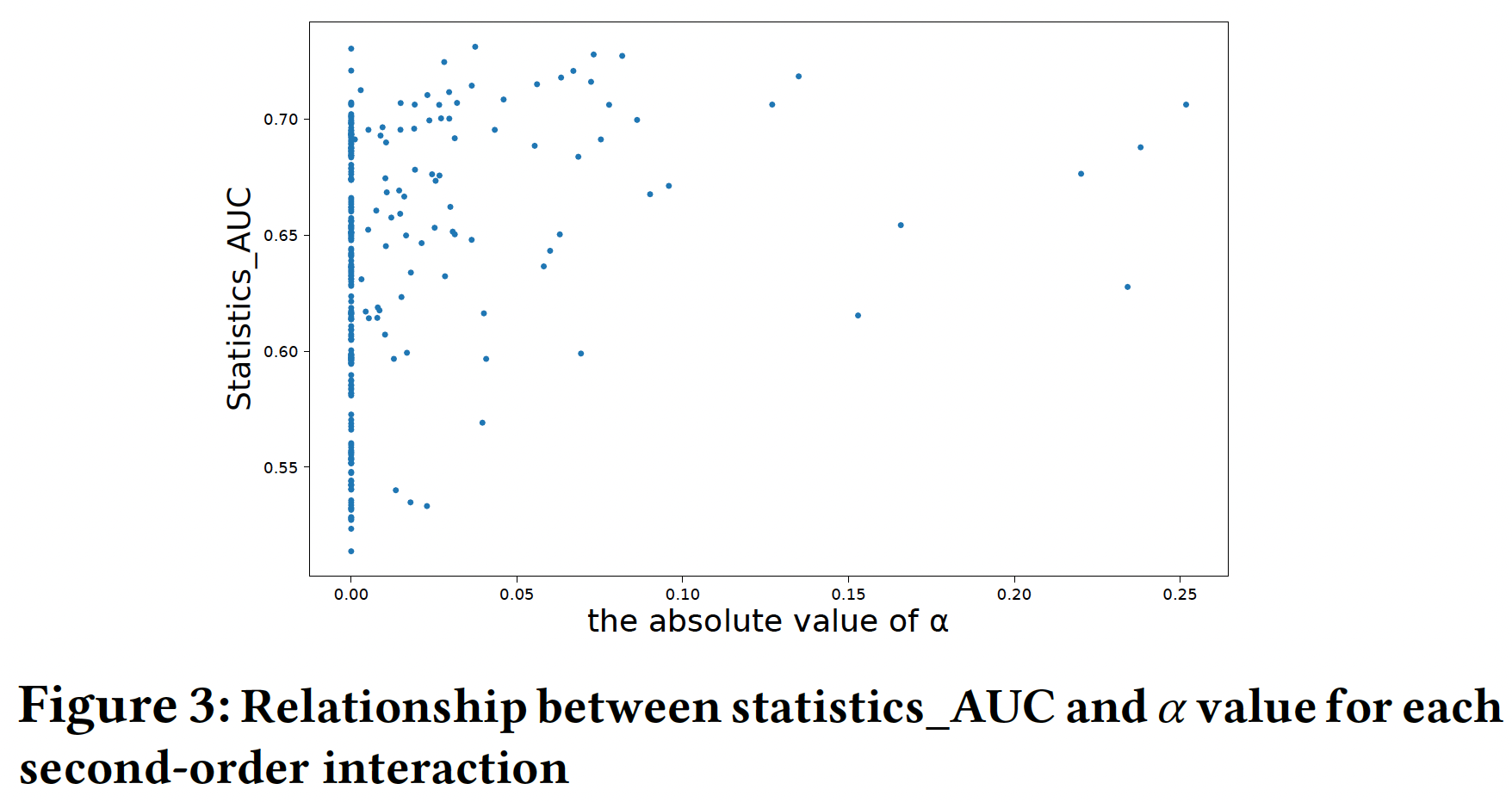
在人工合成数据上:合成数据集是由一个不完整的
poly-2函数产生的,其中的双线性项类似于categories之间的交互。基于这个数据集,我们研究了:我们的模型是否能够找到重要的交互、我们的模型与其他FM模型相比的性能。数据集的输入
field的binary标签:其中,数据分布
data pair是独立同分布采样来构建训练集和测试集。我们还在采样的数据中加入一个小的随机噪声我们使用
FM和我们的模型来拟合人工合成数据。我们在测试数据集上使用AUC来评估这些模型。我们选择
Figure 4展示了我们的模型与FM的性能比较,这表明了我们的模型的优越性。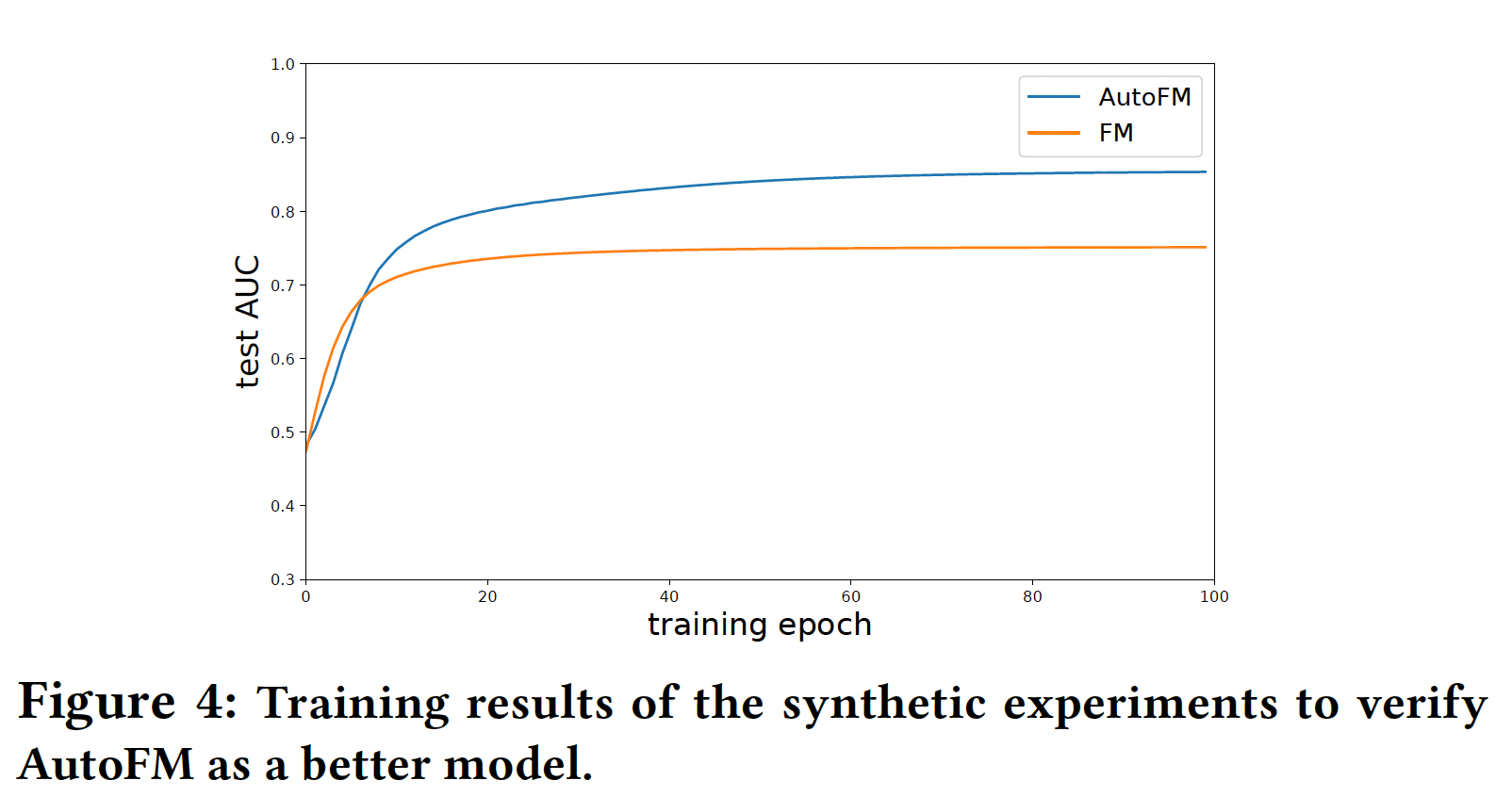
如
Figure 5所示,我们的模型可以精确地提取重要的特征交互: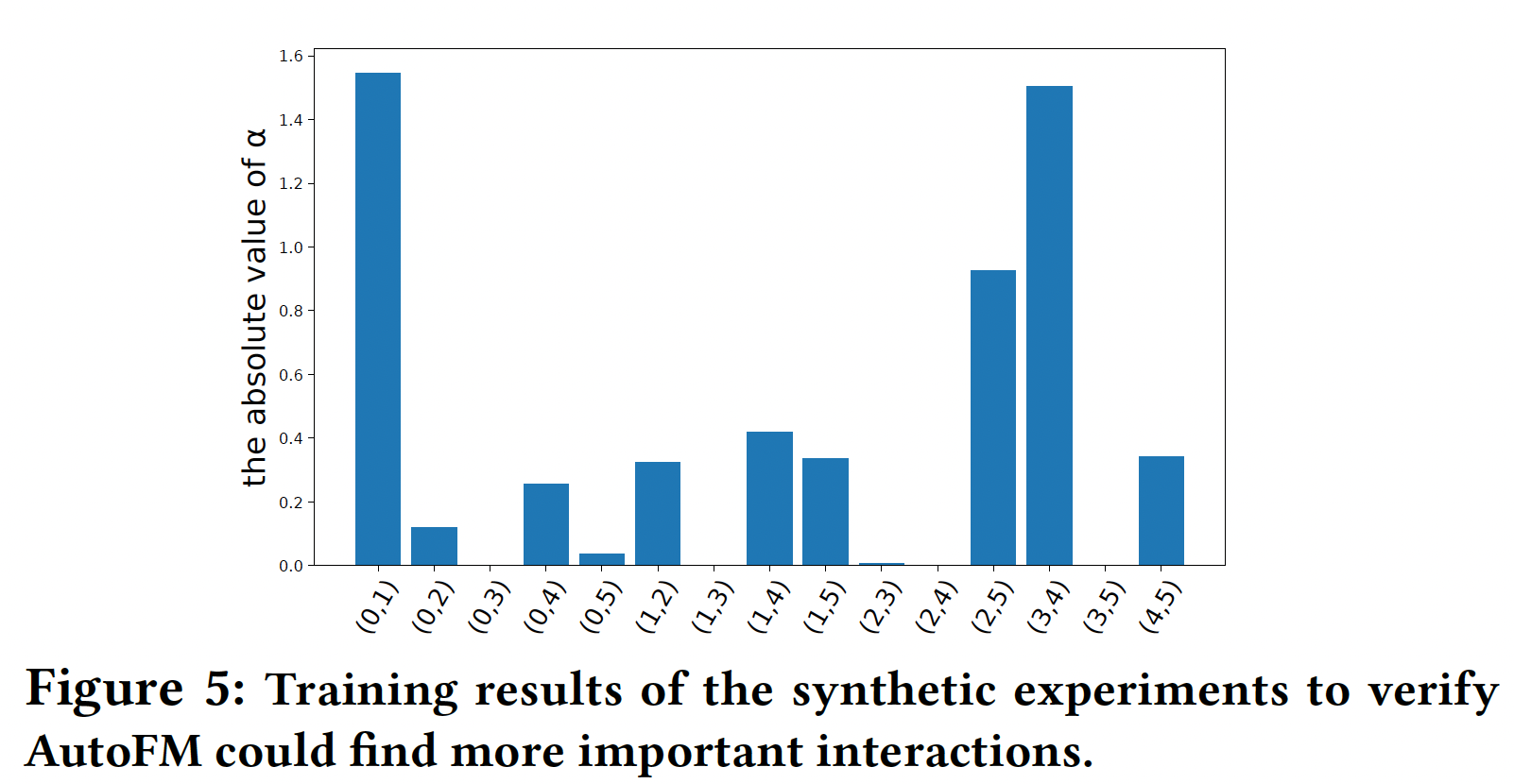
在线实验:我们在华为应用商店的推荐系统中进行了在线实验,以验证
AutoDeepFM的卓越性能。具体而言,在
App Store的游戏推荐场景中进行了为期10天的A/B test。我们在线实验的baseline是DeepFM,这是一个强大的baseline,因为它具有优秀的准确性和高效率,已经在商业系统中部署了很长一段时间。对照组:随机选择
5%的用户,并向他们展示由DeepFM生成的推荐。实验组:随机选择
5%的用户,并向他们展示由AutoDeepFM生成的推荐。
Figure 6和Figure 7显示了实验组比对照组在CTR(#downloads/#impressions)和CVR(#downloads/#user)上的改进。可以看到:该系统是相当稳定的,在
A/A test期间,CTR和CVR都在8%以内波动。我们的
AutoDeepFM模型在第8天被启动到实时系统中。从第8天开始,我们观察到在CTR和CVR方面比baseline模型有明显的改善。在10天的A/B test中,CTR的平均改进为20.3%,CVR的平均改进为20.1%。这些结果证明了我们所提出的模型的巨大有效性。从第
18天开始,我们再次进行A/A test,在实验组中用baseline模型替换我们的AutoDeepFM模型。我们观察到实验组的性能急剧下降,这再次验证了实验组在线性能的改善确实是由我们提出的模型引入的。

消融研究:
不同随机数种子下
Avazu上用不同的随机数种子运行AutoFM的搜索阶段。由不同随机数种子估计的
Pearson相关性约为0.86,这验证了BN,这个Pearson相关性会下降到0.65左右。AutoFIS组件的效果:为了验证AutoFIS中各个组件的有效性,我们提出了几个变体,如Table 6所示。为了验证
AutoFIS搜索阶段的有效性,我们将其与"Random"策略(即,随机选择特征交互)进行比较。在重训练阶段,我们验证了
BN和
注意,对于
AutoFM-BN,仅仅是在重训练阶段没有BN,而在搜索阶段还是用了BN的。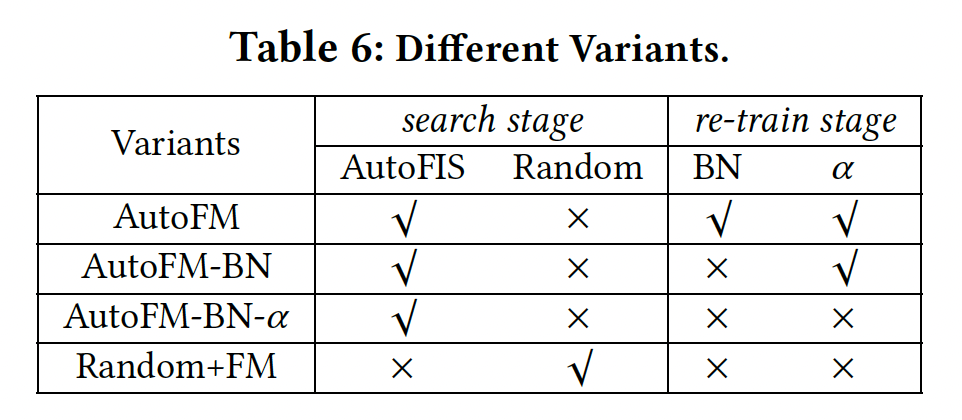
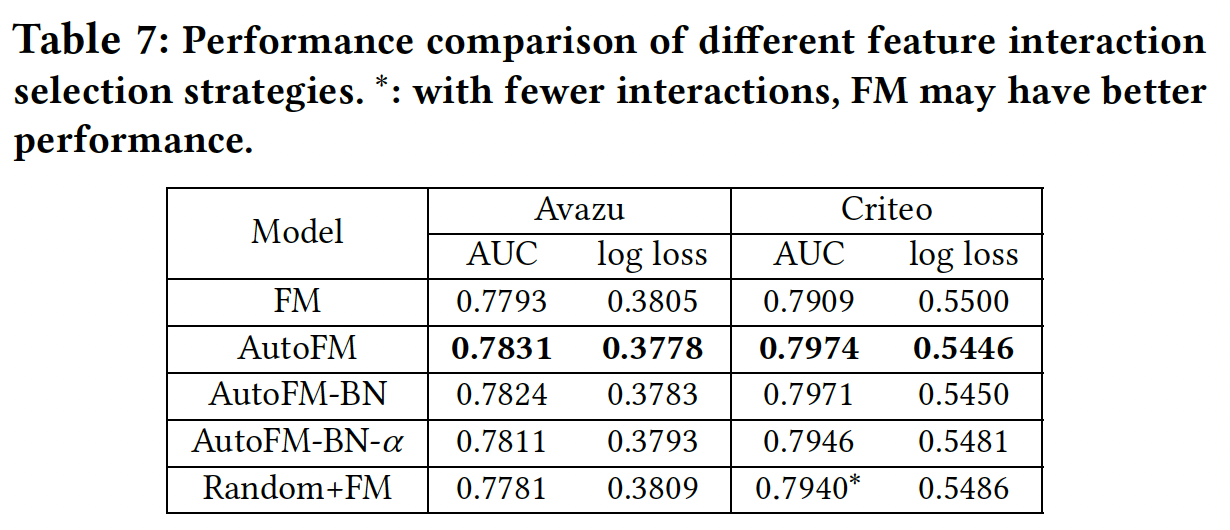
Table 7列出了这些变体的性能。对于"Random"策略,我们选择与AutoFM相同的交互数量,我们尝试了10种不同的"Random"策略,并对结果进行了平均。结论:
比较
AutoFM-BN-𝛼和Random+FM,我们可以看到:在相同数量的交互下,AutoFIS的选择总是能取得比随机选择更好的性能。这说明在搜索阶段AutoFIS就能识别出重要的交互。在
Criteo数据集中,Random+FM和FM之间的性能差距表明:在某些情况下,随机选择的特征交互可能优于保留所有特征交互的模型。这支持了我们的说法:移除一些无用的特征交互可以提高性能。类似于
xgboost中的feature sample。在
Avazu数据集中,Random+FM略逊于FM。AutoFM和AutoFM-BN之间的比较验证了BN在重训练阶段的有效性,其中的原因在AutoFIS章节已经说明。AutoFM-BN和AutoFM-BN-𝛼之间的性能差距表明:
one-level optimization vs bi-level optimization:结果如Table 8所示。可以看到:AutoFM和Bi-AutoFM(以及AutoDeepFM和Bi-AutoDeepFM)之间的性能差距表明了one-level optimization比bi-level optimization的优越性,其原因在one-level optimization章节已经说明。