k 近邻法
一、k 近邻算法
近邻法(
k-Nearest Neighbor:kNN)是一种基本的分类与回归方法。- 分类问题:对新的样本,根据其 个最近邻的训练样本的类别,通过多数表决等方式进行预测。
- 回归问题:对新的样本,根据其 个最近邻的训练样本标签值的均值作为预测值。
近邻法不具有显式的学习过程,它是直接预测。它是“惰性学习”(
lazy learning)的著名代表。它实际上利用训练数据集对特征向量空间进行划分,并且作为其分类的"模型"。
这类学习技术在训练阶段仅仅将样本保存起来,训练时间开销为零,等到收到测试样本后再进行处理。
那些在训练阶段就对样本进行学习处理的方法称作“急切学习”(
eager learning)。
近邻法是个非参数学习算法,它没有任何参数( 是超参数,而不是需要学习的参数)。
近邻模型具有非常高的容量,这使得它在训练样本数量较大时能获得较高的精度。
它的缺点有:
计算成本很高。因为需要构建一个 的距离矩阵,其计算量为 ,其中 为训练样本的数量。
当数据集是几十亿个样本时,计算量是不可接受的。
在训练集较小时,泛化能力很差,非常容易陷入过拟合。
无法判断特征的重要性。
近邻法的三要素:
- 值选择。
- 距离度量。
- 决策规则。
1.1 k 值选择
当 时的 近邻算法称为最近邻算法,此时将训练集中与 最近的点的类别作为 的分类。
值的选择会对 近邻法的结果产生重大影响。
若 值较小,则相当于用较小的邻域中的训练样本进行预测,"学习"的偏差减小。
只有与输入样本较近的训练样本才会对预测起作用,预测结果会对近邻的样本点非常敏感。
若近邻的训练样本点刚好是噪声,则预测会出错。即: 值的减小意味着模型整体变复杂,易发生过拟合。
- 优点:减少"学习"的偏差。
- 缺点:增大"学习"的方差(即波动较大)。
若 值较大,则相当于用较大的邻域中的训练样本进行预测。
这时输入样本较远的训练样本也会对预测起作用,使预测偏离预期的结果。
即: 值增大意味着模型整体变简单。
- 优点:减少"学习"的方差(即波动较小)。
- 缺点:增大"学习"的偏差。
应用中, 值一般取一个较小的数值。通常采用交叉验证法来选取最优的 值。
1.2 距离度量
特征空间中两个样本点的距离是两个样本点的相似程度的反映。
近邻模型的特征空间一般是 维实数向量空间 , 其距离一般为欧氏距离,也可以是一般的 距离:
- 当 时,为欧氏距离:
- 当 时,为曼哈顿距离:
- 当 时,为各维度距离中的最大值:
不同的距离度量所确定的最近邻点是不同的。
1.3 决策规则
1.3.1 分类决策规则
分类决策通常采用多数表决,也可以基于距离的远近进行加权投票:距离越近的样本权重越大。
多数表决等价于经验风险最小化。
设分类的损失函数为 损失函数,分类函数为 。
给定样本 ,其最邻近的 个训练点构成集合 。设涵盖 区域的类别为 (这是待求的未知量,但是它肯定是 之一),则损失函数为:
就是训练数据的经验风险。要使经验风险最小,则使得 最大。即多数表决: 。
1.3.2 回归决策规则
回归决策通常采用均值回归,也可以基于距离的远近进行加权投票:距离越近的样本权重越大。
均值回归等价于经验风险最小化。
设回归的损失函数为均方误差。给定样本 ,其最邻近的 个训练点构成集合 。设涵盖 区域的输出为 ,则损失函数为:
就是训练数据的经验风险。要使经验风险最小,则有: 。即:均值回归。
1.4 k 近邻算法
近邻法的分类算法:
输入:
- 训练数据集
- 给定样本
- 训练数据集
输出: 样本 所属的类别
步骤:
- 根据给定的距离度量,在 中寻找与 最近邻的 个点。定义涵盖这 个点的 的邻域记作 。
- 从 中,根据分类决策规则(如多数表决) 决定 的类别 : 。
近邻法的回归算法:
输入:
- 训练数据集
- 给定样本
- 训练数据集
输出:样本 的输出
步骤:
- 根据给定的距离度量,在 中寻找与 最近邻的 个点。定义涵盖这 个点的 的邻域记作 。
- 从 中,根据回归决策规则(如均值回归) 决定 的输出 : 。
二、 kd树
实现 近邻法时,主要考虑的问题是:如何对训练数据进行快速 近邻搜索。
最简单的实现方法:线性扫描。此时要计算输入样本与每个训练样本的距离。
当训练集很大时,计算非常耗时。解决办法是:使用 树来提高 近邻搜索的效率。
树是一种对 维空间中的样本点进行存储以便对其进行快速检索的树型数据结构。
它是二叉树,表示对 维空间的一个划分。
构造 树的过程相当于不断的用垂直于坐标轴的超平面将 维空间切分的过程。
树的每个结点对应于一个 维超矩形区域。
2.1 kd树构建算法
平衡 树构建算法:
输入: 维空间样本集
输出: 树
算法步骤:
构造根结点。根结点对应于包含 的 维超矩形。
选择 为轴,以 中所有样本的 坐标的中位数 为切分点,将根结点的超矩形切分为两个子区域,切分产生深度为 1 的左、右子结点。切分超平面为: 。
- 左子结点对应于坐标 的子区域。
- 右子结点对应于坐标 的子区域。
- 落在切分超平面上的点( ) 保存在根结点。
对深度为 的结点,选择 为切分的坐标轴继续切分, 。本次切分之后,树的深度为 。
这里取模而不是 ,因为树的深度可以超过维度 。此时切分轴又重复回到 ,轮转坐标轴进行切分。
直到所有结点的两个子域中没有样本存在时,切分停止。此时形成 树的区域划分。
2.2 kd 树搜索算法
树最近邻搜索算法( 近邻搜索以此类推):
输入:
- 已构造的 树
- 测试点
输出: 的最近邻测试点
步骤:
初始化:当前最近点为 ,当前最近距离为 。
在 树中找到包含测试点 的叶结点: 从根结点出发,递归向下访问 树(即:执行二叉搜索):
- 若测试点 当前维度的坐标小于切分点的坐标,则查找当前结点的左子结点。
- 若测试点 当前维度的坐标大于切分点的坐标,则查找当前结点的右子结点。
在访问过程中记录下访问的各结点的顺序,存放在先进后出队列
Queue中,以便于后面的回退。循环,结束条件为
Queue为空。循环步骤为:从
Queue中弹出一个结点,设该结点为 。计算 到 的距离,假设为 。若 ,则更新最近点与最近距离:
如果 为中间节点:考察以 为球心、以 为半径的超球体是否与 所在的超平面相交。
如果相交:
- 若
Queue中已经访问过了 的左子树,则继续二叉搜索 的右子树。 - 若
Queue中已经访问过了 的右子树,则继续二叉搜索 的左子树。
二叉搜索的过程中,仍然在
Queue中记录搜索的各结点。- 若
循环结束时, 就是 的最近邻点。
树搜索的平均计算复杂度为 , 为训练集大小。
树适合 的情形,当 与 维度 接近时效率会迅速下降。
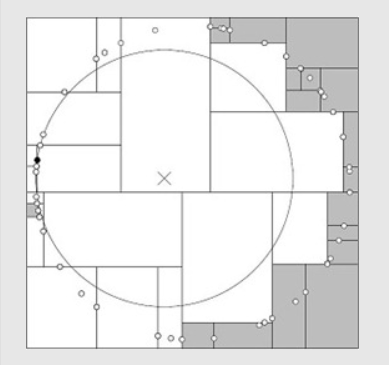
通常最近邻搜索只需要检测几个叶结点即可:
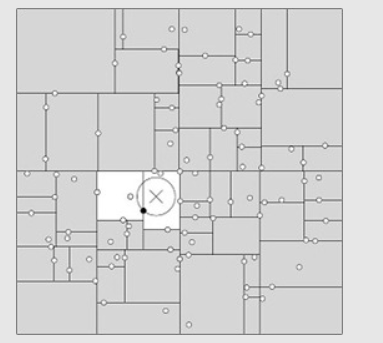
但是如果样本点的分布比较糟糕时,需要几乎遍历所有的结点:
2.3 示例
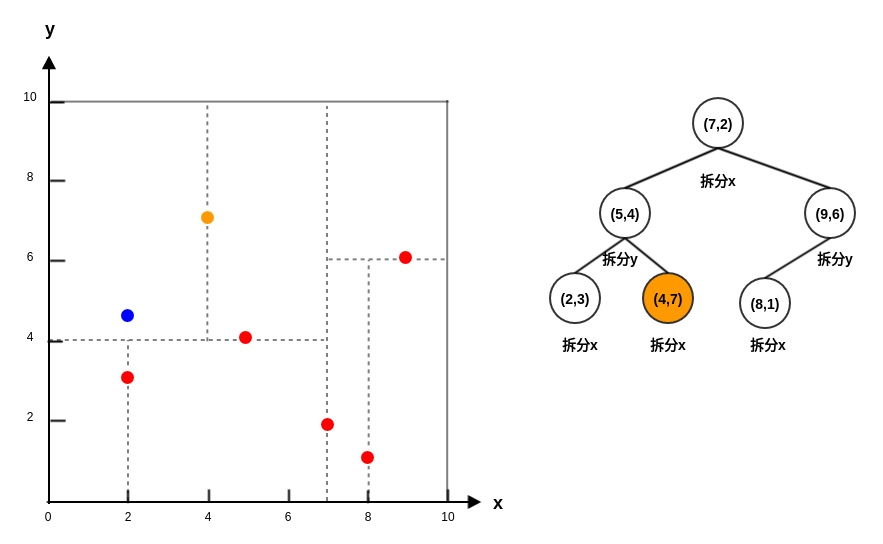
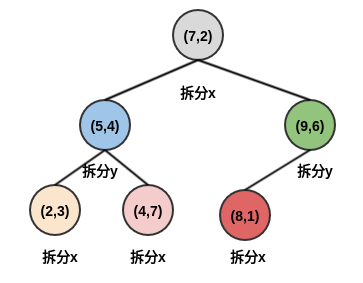
假设有 6 个二维数据点: 。
构建
kd树的过程:首先从
x轴开始划分,根据x轴的取值2,5,9,4,8,7得到中位数为7,因此切分线为: 。可以根据
x轴和y轴上数据的方差,选择方差最大的那个轴作为第一轮划分轴。左子空间(记做 )包含点
(2,3),(5,4),(4,7),切分轴轮转,从y轴开始划分,切分线为: 。右子空间(记做 )包含点
(9,6),(8,1),切分轴轮转,从y轴开始划分,切分线为: 。的左子空间(记做 )包含点
(2,3),切分轴轮转,从x轴开始划分,切分线为:。其左子空间记做 ,右子空间记做 。由于 都不包含任何点,因此对它们不再继续拆分。
的右子空间(记做 )包含点
(4,7),切分轴轮转,从x轴开始划分,切分线为:。其左子空间记做 ,右子空间记做 。由于 都不包含任何点,因此对它们不再继续拆分。
的左子空间(记做 )包含点
(8,1),切分轴轮转,从x轴开始划分,切分线为:。其左子空间记做 ,右子空间记做 。由于 都不包含任何点,因此对它们不再继续拆分。
的右子空间(记做 )不包含任何点,停止继续拆分。
最终得到样本空间拆分图如下:
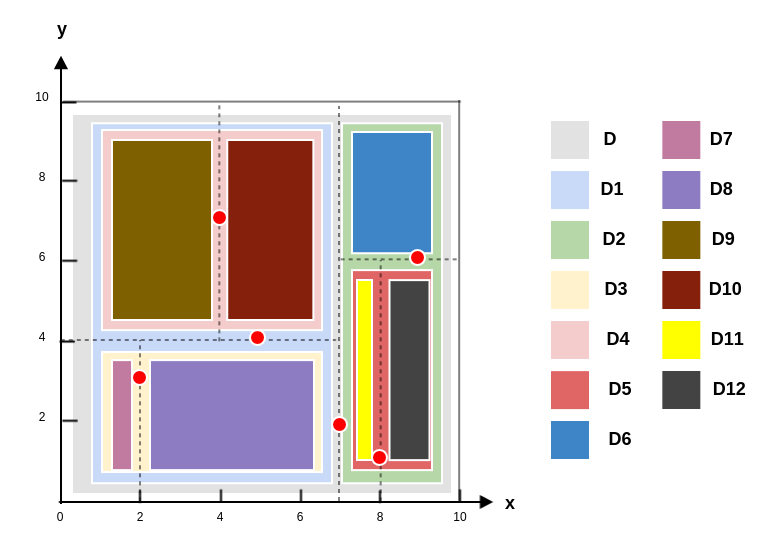
样本空间结构图如下:
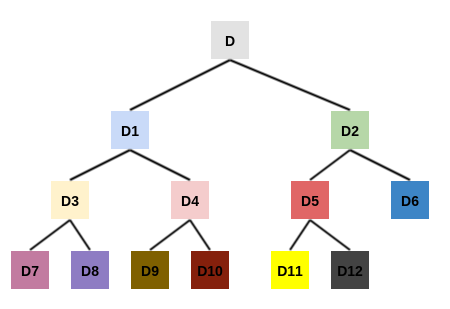
kd树如下。-
kd树以树的形式,根据样本空间的拆分,重新组织了数据集的样本点。每个结点都存放着位于划分平面上数据点。 - 由于
样本空间结构图中的叶区域不包含任何数据点,因此叶区域不会被划分。因此kd树的高度要比样本空间结构图的高度少一层。 - 从
kd树中可以清晰的看到坐标轮转拆分。
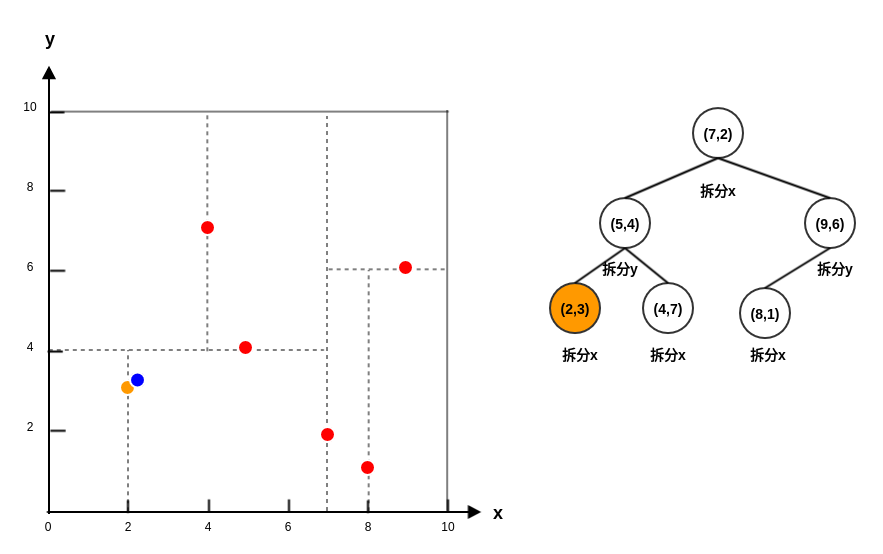
假设需要查询的点是
P=(2.1,3.1)。首先从
kd树进行二叉查找,最终找到叶子节点(2,3),查找路径为:Queue=<(7,2),(5,4),(2,3)>。Queue弹出结点(2,3):P到(2,3)的距离为0.1414,该距离作为当前最近距离,(2,3)作为候选最近邻点。Queue弹出结点(5,4):P到(5,4)的距离为3.03。候选最近邻点仍然为(2,3),当前最近距离仍然为0.1414。因为结点
(5,4)为中间结点,考察以P为圆心,以0.1414为半径的圆是否与y=4相交。结果不相交,因此不用搜索(5,4)的另一半子树。Queue弹出结点(7,2):P到(7,2)的距离为5.02。候选最近邻点仍然为(2,3),当前最近距离仍然为0.1414。因为结点
(7,2)为中间结点,考察以P为圆心,以0.1414为半径的圆是否与x=7相交。结果不相交,因此不用搜索(7,2)的另一半子树。现在
Queue为空,迭代结束。因此最近邻点为(2,3),最近距离为0.1414。
假设需要查询的点是
P=(2,4.5)。首先从
kd树进行二叉查找,最终找到叶子节点(4,7),查找路径为:Queue=<(7,2),(5,4),(4,7)>。Queue弹出结点(4,7):P到(4,7)的距离为3.202,该距离作为当前最近距离,(4,7)作为候选最近邻点。Queue弹出结点(5,4):P到(5,4)的距离为3.041,该距离作为当前最近距离,(5,4)作为候选最近邻点。因为
(5,4)为中间结点,考察以P为圆心,以3.041为半径的圆是否与y=4相交。结果相交,因此二叉搜索
(5,4)的另一半子树,得到新的查找路径为:Queue=<(7,2),(2,3)>。二叉查找时,理论上
P应该位于结点(5,4)的右子树 。但是这里强制进入(5,4)的左子树,人为打破二叉查找规则。接下来继续维持二叉查找规则。Queue弹出结点(2,3):P到(2,3)的距离为1.5,该距离作为当前最近距离,(2,3)作为候选最近邻点。Queue弹出结点(7,2):P到(7,2)的距离为5.59。候选最近邻点仍然为(2,3),当前最近距离仍然为1.5。因为结点
(7,2)为中间结点,考察以P为圆心,以1.5为半径的圆是否与x=7相交。结果不相交,因此不用搜索(7,2)的另一半子树。现在
Queue为空,迭代结束。因此最近邻点为(2,3),最近距离为1.5。